
Henry Hong-Ning Dai
Hong Kong Baptist University
Joint Auction-Coalition Formation Framework for Communication-Efficient Federated Learning in UAV-Enabled Internet of Vehicles
Abstract
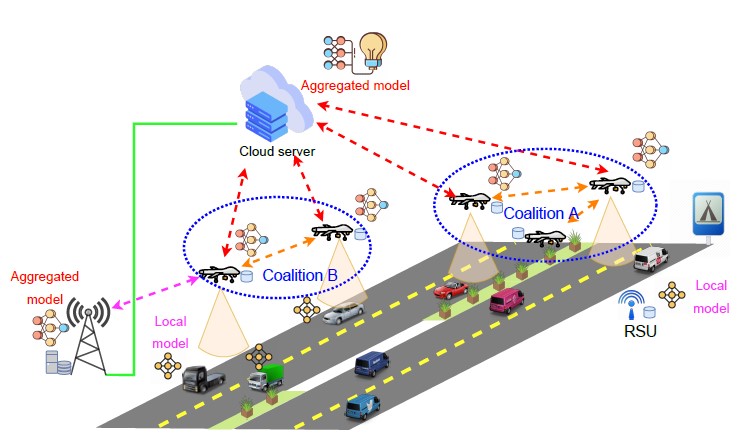
Due to the advanced capabilities of the Internet of Vehicles (IoV) components such as vehicles, Roadside Units (RSUs) and smart devices as well as the increasing amount ofdata generated, Federated Learning (FL) becomes a promising tool given that it enables privacy-preserving machine learning that can be implemented in the IoV. However, the performance of the FL suffers from the failure of communication links and missing nodes, especially when continuous exchanges of model parameters are required. Therefore, we propose the use of Unmanned Aerial Vehicles (UAVs) as wireless relays to facilitate the communications between the IoV components and the FL server and thus improving the accuracy of the FL. However, a single UAV may not have sufficient resources to provide services for all iterations of the FL process. In this paper, we present a joint auction-coalition formation framework to solve the allocation of UAV coalitions to groups of IoV components. Specifically, the coalition formation game is formulated to maximize the sum of individual profits of the UAVs. The joint auction-coalition formation algorithm is proposed to achieve a stable partition of UAV coalitions in which an auction scheme is applied to solve the allocation of UAV coalitions. The auction scheme is designed to take into account the preferences of IoV components over heterogeneous UAVs. The simulation results show that the grand coalition, where all UAVs join a single coalition, is not always stable due to the profit-maximizing behavior of the UAVs. In addition, we show that as the cooperation cost of the UAVs increases, the UAVs prefer to support the IoV components independently and not to form any coalition.
Bibtex
@ARTICLE{JSNg:TITS20,
author={JJer Shyuan Ng and Wei Yang Bryan Lim and Hong-Ning Dai and Zehui Xiong and Jianqiang Huang and Dusit Niyato and Xian-Sheng Hua and Cyril Leung and Chunyan Miao},
journal={IEEE Transactions on Intelligent Transportation Systems},
title={Joint Auction-Coalition Formation Framework for Communication-Efficient Federated Learning in UAV-Enabled Internet of Vehicles},
year={2020},
volume={},
number={},
pages={},
doi={10.1109/TITS.2020.3041345}
}
Leave a Reply